
Not many students get the opportunity to contribute to a live research project. Even fewer get the chance to do this in such beautiful surroundings as the University of Lincoln’s breathtakingly beautiful 200-hectare working farm – Riseholme Campus.
We speak with Cohort 3, AgriFoRwArdS CDT student Callum Lennox, about his experience working at Riseholme on the AI Unleashed research project, led by Professor Elizabeth Sklar. One of nearly two dozen research projects taking place on the campus, and how it has helped him prepare for his future PhD research work.

What is the AI Unleashed project?
Artificial intelligence has the potential to transform agriculture. However, AI is not reaching its full potential because the processing speed on machines is a significant bottleneck. The AI Unleashed project looks at improving processing speeds for data handling.
My area of focus within this project, was to create a system that would be able to perform the precision spraying of weeds by only spraying from a particular nozzle when a weed is detected directly below it.
The AI Unleashed project supports this as image processing takes place external to the robot so that each robot in a fleet doesn’t require a large GPU to process any of the images of weeds that are seen. Once a weed is identified (in realtime), the ability to precision spray means that we reduce the use of pesticides as well as reduce spray drift. This not only saves money, but also reduces the negative impact on the environment by the use of these chemicals.
What sort of work did you do?
I worked in this project alongside several post graduate and assistant researchers, but spent most of my time towards the second half of the project supporting Adrian Salazar Gomez and Madeleine Darbyshire, both of the Lincoln Centre for Autonomous Systems (L-CAS).
I worked on the area of low level hardware, software, and electronics, to setup up a system that could spray when communicated to over USB. Specifically this meant setting up the hardware that would allow the spray valves and nozzles to be attached to the trailer tank, and developed the software to interface with these valves to enable them to precisely open and close when required, in realtime.
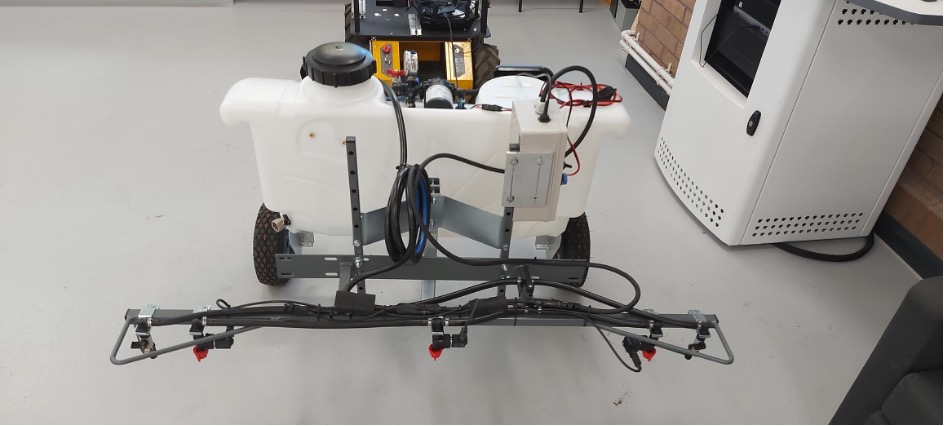
The system itself consisted of valves, nozzles, as well as a valve control circuit. This interfaced with a computer vision system using Artificial Intelligence (AI) to autonomously detect a weed. When the AI vision system detected a weed below a particular nozzle, the associated valve opened and the detected weed is precision sprayed. The tank of spray liquid alongside the sprayer boom was pulled by a husky robot in front of the system.

This spray system features a boom sprayer on the back of the robot. This type of sprayer has nozzles that are positioned evenly along its length. These sprayers are widely used in commercial applications on a much larger scale in spraying weeds in farms. The system we developed was a lot smaller in scale than those in industry, and featured 3 nozzles rather than the vast number on a commercial sprayer that would usually be attached to a tractor.
After the completion of this project, the system can be used within research to develop enhanced systems that further investigate the vision and timing required to more precisely spray weeds within in-field environments.
Did you enjoy working at Riseholme?
I really enjoyed working at Riseholme for this research project. Around the campus there’s a lot of greenery, mostly because of the campus’ proximity to farmland being on the edge of Lincoln. One of the nice things about this is that any technology you have or make for agriculture, can be deployed very quickly within its desired working environment.
As Riseholme is also a working farm, it is also possible to more easily collect datasets of plant images from the campus as many varieties of crops are grown specifically with weeds for the purpose of creating “green on green” detectors that can differentiate weeds from crops. This is an area that Cohort 2, AgriFoRwArdS CDT student, Grey Churchill is researching, supported by industry sponsor Syngenta.
How has taking part in this research helped prepare you for your PhD?
For my PhD research, I will be investigating boom sprayer systems, and the vision system interface required to detect weeds and details about the timing requirements to optimise the precision spray of detected weeds.
Working within the AI Unleashed project has helped enhance my research by allowing me to get a head start in investigating the kind of hardware that I’d be working with. This was particularly useful as I haven’t worked with tanks or valve systems before. It also helped me become more accustomed to the use of a Control Area Network (CAN) bus, as this was the communication protocol that was used to communicate with the valves.
Thank you Callum for sharing your experiences with us, so the rest of the AgriFoRwArdS cohorts can benefit from it. We are pretty envious that you got to spend time here doing such amazing work!
For more information on the research being done within AgriFoRwArdS and LIAT, please visit the respective websites.